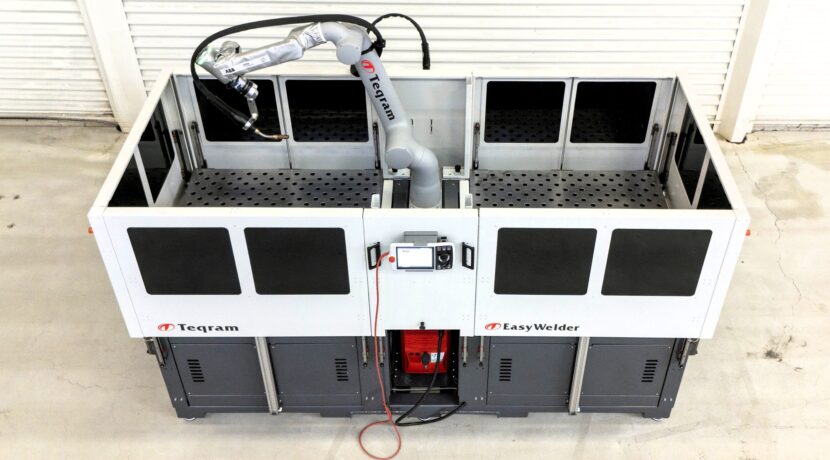
Teqram has introduced the EasyWelder, a welding cobot cell designed to increase usable welding time in small and medium-sized series. Its main feature is a dual-station layout that allows the robot to weld on one side while the operator prepares or removes parts on the other. For metalworking companies, the practical gain lies in less waiting time and a more consistent production flow.
Many welding cobots can automate repetitive welds. However, the changeover between products often limits their real output. In workshops with variable product runs, the time spent clamping, unloading, correcting programs, or preparing the next part can quickly reduce the effective use of the robot. Teqram has approached that bottleneck by focusing not only on the welding process itself but also on what happens around it.
The EasyWelder is aimed at companies dealing with limited welding capacity, staff shortages, changing workpieces, and rising quality demands. According to Teqram managing director Frans Tollenaar, the system was developed to keep producing continuously while remaining easy to program. The cell combines two welding tables, automatic guarding, manual guidance for teaching, weld seam detection, and integrated welding equipment from ABB and Fronius. The result is a compact installation intended to make robot welding more accessible for companies without dedicated robot specialists.
Dual stations reduce waiting time
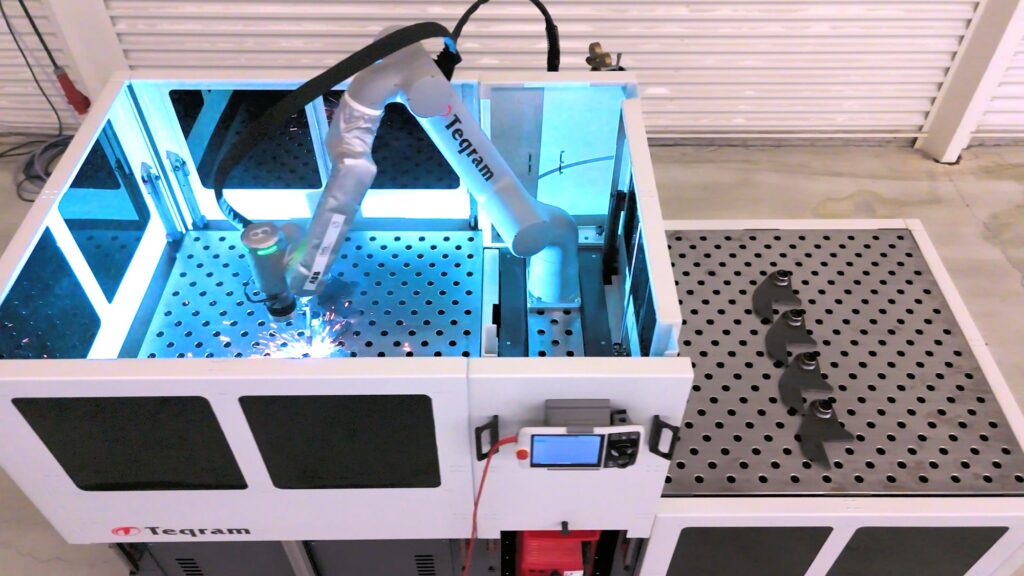
The dual-station configuration is the central design choice in the EasyWelder. Instead of one workstation, the cell uses two separate 1200 x 1200 mm welding tables. While the cobot welds a product on one table, the operator can safely clamp the next part or remove a finished component on the other table. This keeps the robot active for a larger part of the production cycle.
In practice, this addresses one of the common causes of lost time in cobot welding, manual part handling during changeover. Teqram states that the configuration can deliver an effective arc time of up to 80%, because the robot does not need to wait for every loading and unloading step. For small and medium-sized series, where products change frequently, that difference can have a direct effect on capacity planning and delivery reliability.
The work area is equipped with an automatically moving guard with UV-filtering windows. This allows the cobot to run at high speed while the welding process remains visible. Both tables are accessible from three sides, which simplifies clamping and handling. For larger workpieces, the two stations can be combined into one work area of 2900 x 1200 mm.

Teaching without programming knowledge
Ease of use is another important part of the concept. Teqram has designed the EasyWelder for companies that have experienced welders, but not necessarily employees with robot programming skills. The system uses an intuitive interface and smart templates, so operators can create programs for common welding operations without working in external software.
The operator teaches a weld by manually guiding the robot arm along the seam and storing the required points with buttons on the robot head or with a special ring. The welding code is then generated automatically. According to Teqram, this can reduce programming time by up to 70%. The company also states that experienced welders can work independently with the system after half a day of training.
The system supports operations such as circular seams, chain welding, tack welding, multi-pass welding, and longitudinal seams. For workshops with many product variants, this is relevant because programming time can otherwise become a barrier to automation. If a new product can be taught quickly at the machine, the cobot becomes more useful outside long repetitive series.

Seam tracking compensates for deviations
The EasyWelder includes automatic weld seam detection and seam tracking. During welding, the system detects the actual position of the workpiece and the seam in real time, then adapts the welding program to match. This is intended to compensate for dimensional tolerances and inaccuracies in clamping without manual correction in most cases.
For production environments, that matters because welded parts do not always arrive at the cobot in exactly the same position. Small differences in fit-up or fixture placement can lead to inconsistent welds if the robot simply repeats a fixed path. By correcting the path during the process, the system is designed to maintain consistent weld quality across repeated parts.
Teqram links this function to its experience with AI-driven 3D vision. The press information does not describe the underlying sensor setup in detail, but the practical purpose is clear. The cobot should reduce dependence on manual adjustment and reprogramming when workpieces show acceptable variation. That can lower rework and scrap, while making the process more predictable than manual welding, where results are influenced by experience, fatigue, and daily conditions.

ABB and Fronius integration in a compact cell
The EasyWelder is built around the ABB GoFa cobot and Fronius welding equipment. Teqram specifies a path accuracy of 0.03 mm for the ABB GoFa and a maximum robot speed of 2.2 meters per second. In the cell, this allows the robot arm to move quickly between welding positions, reducing non-welding movement time within the cycle.
The integrated Fronius welding source is included for stable arc performance and intelligent welding processes. According to the supplied information, the system can be used for thin materials, stainless steel, and aluminum, with minimal spatter and distortion. The controls of the cobot and welding source are integrated in a plug-and-play setup, so both systems work together within the cell.
The installation has a footprint of 3100 x 1600 mm and does not require floor anchoring. It can be moved with a forklift, allowing welding capacity to be placed where it is needed in the workshop. Commissioning is kept straightforward: the cell must be positioned and connected to power, compressed air, and welding gas. For companies with shifting production needs, that mobility can be as important as the robot itself.