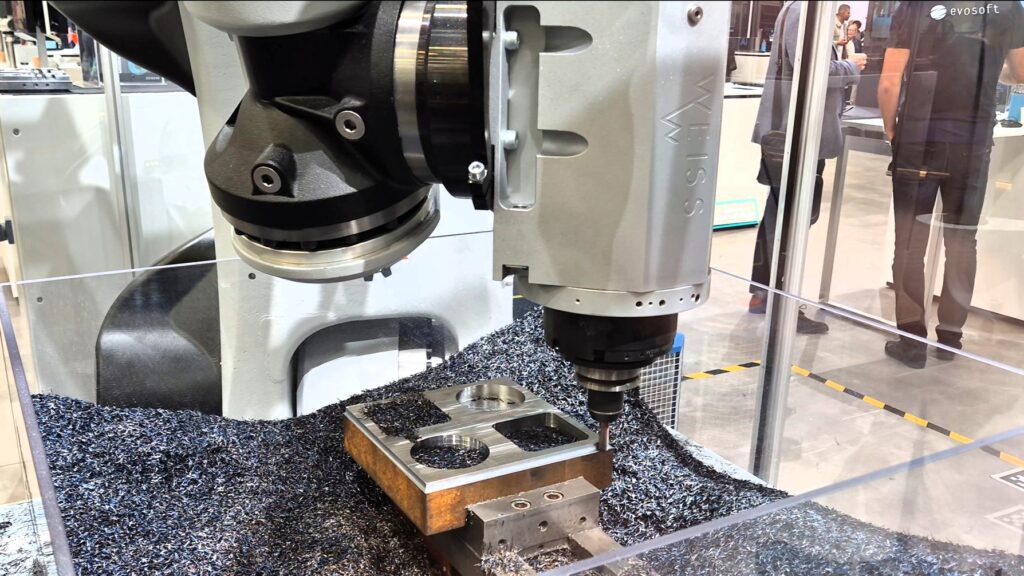
At a recent trade fair, we came across an interesting machining application at Siemens in which an industrial robot was being used as a machining unit. The technology itself is not new, but it is still rarely encountered in day-to-day production. That makes this combination of robotics and CNC control all the more interesting to examine more closely.
For decades, CNC machines have formed the foundation of the machining industry. Thanks to CNC control, complex shapes can be machined repeatedly with a high degree of accuracy. For a long time, industrial robots played a supporting role in this landscape. They loaded and unloaded workpieces, but rarely took an active part in the machining process itself. Siemens has changed that with Run MyRobot. Robots are integrated into the Sinumerik CNC control system and function as an extension of the machine.
Why accuracy remains the key challenge in robotic machining
One of the biggest obstacles in robotic machining is accuracy. Industrial robots are far less accurate than CNC machines and are sensitive to vibration, fluctuating loads and thermal influences. During rapid movements or changes in direction, this can lead to deviations in the toolpath. CNC control systems such as Sinumerik are specifically designed to deal with these kinds of effects. They calculate movements in advance, take dynamic behaviour into account and continuously adjust parameters such as feed and damping. Applying these algorithms to a robot arm results in much more stable and predictable motion. This makes machining operations possible that were previously beyond the reach of standard robotic systems.
Hybrid production combining robots and CNC machines
With improved path accuracy, the role of the robot on the shop floor begins to shift. Where it was previously mainly a logistical assistant, it can now actively participate in the machining process. Examples include deburring, grinding, polishing or even light milling, carried out alongside a conventional machining centre. One commonly cited scenario is hybrid production. A CNC machine performs the primary machining operation, after which a robot takes over the workpiece for secondary processing. While the robot is active, the machine can already begin on the next part. This increases machine utilisation without the need to install additional machines.
According to Siemens, an industrial robot will not become a universal replacement for the CNC machine. For heavy machining, high productivity and tight tolerances, a conventional machine structure remains superior. The strength of robotic machining lies in flexibility, reach and multifunctionality.
Two different machining strategies
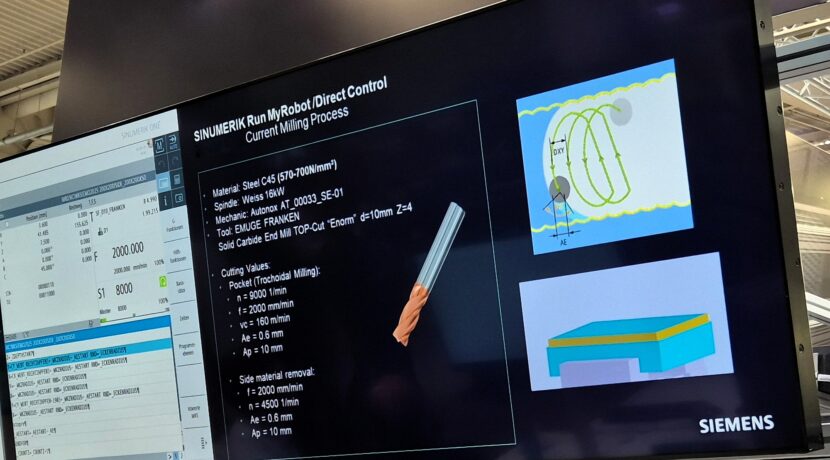
During the trade fair, Siemens presented an industrial robot controlled by Sinumerik Run MyRobot, demonstrating machining operations in C45 structural steel with a tensile strength of approximately 570 to 700 N/mm². The robot was shown carrying out two different machining strategies.
In the first step, trochoidal pocket milling is applied. This strategy is particularly suitable for robotic machining because the cutting forces are distributed evenly and peak loads are avoided. The operation is carried out at a spindle speed of 9,000 min⁻¹ and a feed rate of 2,000 mm/min. The cutting speed is 160 m/min, while the radial depth of cut is set at 0.6 mm and the axial depth of cut at 10 mm. This combination of parameters ensures stable machining and limits unwanted vibration in the robot structure.
The robot then performs a machining operation in which material is milled along the side of the workpiece. This operation also uses a spindle speed of 9,000 min⁻¹ and a feed rate of 2,000 mm/min. The radial and axial depths of cut are identical to those used in the trochoidal operation, at 0.6 mm and 10 mm respectively.